What does it take to make decent tires for your projects? According to this 3D printed tire torture test, it’s actually pretty easy — it’s more a question of how well they work when you’re done.
For the test, [Excessive Overkill] made four different sets of shoes for his RC test vehicle. First up was a plain PLA wheel with a knobby tread, followed by an exact copy printed in ABS which he intended to coat with Flex Seal — yes, that Flex Seal. The idea here was to see how well the spray-on rubber compound would improve the performance of the wheel; ABS was used in the hopes that the Flex Seal solvents would partially dissolve the plastic and form a better bond. The next test subjects were a PLA wheel with a separately printed TPU tire, and a urethane tire molded directly to a PLA rim. That last one required a pretty complicated five-piece mold and some specialized urethane resin, but the results looked fantastic.
Non-destructive tests on the tires included an assessment of static friction by measuring the torque needed to start the tire rolling against a rough surface, plus a dynamic friction test using the same setup but measuring torque against increasing motor speed. [Overkill] threw in a destructive test, too, with the test specimens grinding against a concrete block at a constant speed to see how long the tire lasted. Finally, there was a road test, with a full set of each tire mounted to an RC car and subjected to timed laps along a course with mixed surfaces.
Results were mixed, and we won’t spoil the surprise, but suffice it to say that molding your own tires might not be worth the effort, and that Flex Seal is as disappointing as any other infomercial product. We’ve seen other printed tires before, but hats off to [Excessive Overkill] for diving into the data.
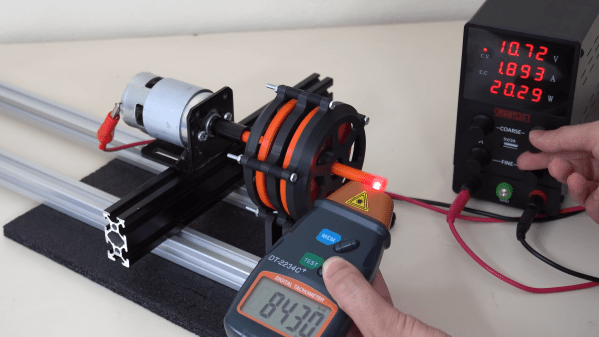
It’s official: [Engineer Bo] wins the internet with a video titled “Finding NEMA 17,” wherein he builds a dynamometer to find the best stepper motor in the popular NEMA 17 frame size.
Like a lot of subjective questions, the only correct answer to which stepper is best is, “It depends,” and [Bo] certainly has that in mind while gathering the data needed to construct torque-speed curves for five samples of NEMA 17 motors using his homebrew dyno. The dyno itself is pretty cool, with a bicycle disc brake to provide drag, a load cell to measure braking force, and an optical encoder to measure the rotation of the motor under test. The selected motors represent a cross-section of what’s commonly available today, some of which appear in big-name 3D printers and other common applications.
[Bo] tested each motor with two different drivers: the TMC2209 silent driver to start with, and because he released the Magic Smoke from those, the higher current TB6600 module. The difference between the two drivers was striking, with lower torque and top speeds for the same settings on each motor using the TB6600, as well as more variability in the data. Motors did better across the board with the TBC6600 at 24 volts, showing improved torque at higher speeds, and slightly higher top speeds. He also tested the effect of microstepping on torque using the TBC6600 and found that using full steps resulted in higher torque across a greater speed range.
At the end of the day, it seems as if these tests say more about the driver than they do about any of the motors tested. Perhaps the lesson here is to match the motor to the driver in light of what the application will be. Regardless, it’s a nice piece of work, and we really appreciate the dyno design to boot — reminds us of a scaled-down version of the one [Jeremey Fielding] demonstrated a few years back.
With few exceptions, power transmission is a field where wobbling is a bad thing. We generally want everything running straight and true, with gears and wheels perfectly perpendicular to their shafts, with everything moving smoothly and evenly. That’s not always the case, though, as this pericyclic gearbox demonstrates.
Although most of the components in [Retsetman] model gearboxes seem familiar enough — it’s mostly just a collection of bevel gears, like you’d see inside a differential — it’s their arrangement that makes everything work. More specifically, it’s the shaft upon which the bevel gears ride, which has a section that is tilted relative to the axis of the shaft. It’s just a couple of degrees, but that small bit of inclination, called nutation, makes the ring gear riding on it wobble as the shaft rotates, allowing it to mesh with one or more ring gears that are perpendicular to the shaft. This engages a few teeth at a time, transferring torque from one gear to another. It’s easier to visualize than it is to explain, so check out the video below.
Gearboxes like these have a lot of interesting properties, with the main one being gear ratio. [Retsetman] achieved a 400:1 ratio with just 3D printed parts, which of course impose their own limitations. But he was still able to apply some pretty serious torque. The arrangement is not without its drawbacks, of course, with the wobbling bits naturally causing unwelcome vibrations. That can be mitigated to some degree using multiple rotatins elements that offset each other, but that only seems to reduce vibration, not eliminate it.
The number of interesting and innovative mechanisms that 3D printing has enabled always fascinates us, and it’s always a treat when one of them shows up in our feeds. This axial flux magnetic gearbox is a great example of such a mechanism, and one that really makes you think about possible applications.
The principles of [Retsetman]’s gearbox are simple for anyone who has ever played with a couple of magnets to understand, since it relies on that powerful attractive and repulsive force you feel when magnets get close to each other. Unlike his previous radial flux gearbox, which used a pair of magnet-studded cylindrical rotors nested one inside the other, this design has a pair of disc-shaped printed rotors that face each other on aligned shafts. Each rotor has slots for sixteen neodymium magnets, which are glued into the slots in specific arrangements of polarity — every other magnet for the low-speed rotor, and groups of four on the high-speed rotor. Between the two rotors is a fixed flux modulator, a stator with ten ferromagnetic inserts screwed into it.
In operation, which the video below demonstrates nicely, the magnetic flux is coupled between the rotors by the steel inserts in the stator so that when one rotor moves, the other moves at a 4:1 (or 1:4) ratio in the opposite direction. [Retsetman] got the gearbox cranked up to about 8,500 RPM briefly, but found that extended operation at as little as 4,000 RPM invited disaster not due to eddy current heating of the inserts or magnets as one might expect, but from simple frictional heating of the rotor bearings.
Torque tests of the original gearbox were unimpressive, but [Retsetman]’s experiments with both laminated stator inserts and more powerful magnets really boosted the output — up to a 250% improvement! We’d also like to see what effect a Halbach array would have on performance, although we suspect that the proper ratios between the two rotors might be difficult to achieve.
If you’re a mechanical engineer, the material covered in this video on the basics of bolted joints probably won’t cover any new ground. On the other hand, if you aren’t a mechanical engineer but still need to bring a little of that discipline to your projects, there’s a lot to learn here.
If there’s one takeaway lesson from [The Efficient Engineer]’s excellent examination of the strength of bolted joints, it’s the importance of preload. Preload is the tensile force created by tightening a bolt or a screw, which provides the clamping force that keeps the joined members together. That seems pretty self-obvious, but there’s more to the story, especially with joints that are subject to cycles or loading and unloading. Such joints tend to suffer from fatigue failure, but proper preloading on the bolts in such a joint mitigates fatigue failure because the bolts are only taking up a small fraction of the total cyclical force on the joint. In other words, make sure you pay attention to factory torque specs.
Wait, what? Is it possible that a tech company just killed off a product with a huge installed base of hardware and a community of dedicated users, and it wasn’t Google? Apparently not, if the stories of the sudden demise of Insteon are to be believed. The cloud-based home automation concern seems to have just disappeared — users report the service went offline at the end of last week, and hasn’t been back since. What’s more, the company’s executives removed Insteon from their LinkedIn profiles, and the CEO himself went so far as to remove his entire page from LinkedIn. The reasons behind the sudden disappearance remained a mystery until today, when The Register reported that Smartlabs, Inc., the parent company of Insteon, had become financially insolvent after an expected sale of the company failed in March. The fact that the company apparently knew this was going to happen weeks ago and never bothered to give the community a heads up before pulling the switches has led to a lot of hard feelings among the estimated 100,000 Insteonhub users.
Then again, with a comet the size of Rhode Island heading our way, a bunch of bricked smart bulbs might just be a moot point. The comet, known as C/2014 UN271, has a nucleus that is far larger than any previously discovered comet, which makes it a bit of an oddball and an exciting object to study. For those not familiar with the United States, Rhode Island is said to be a state wedged between Connecticut and Massachusetts, but even having lived in both those states, we couldn’t vouch for that. For scale, it’s about 80 miles (128 km) across, or a little bit bigger than Luxembourg, which we’re pretty sure is mythical, too. The comet is a couple of billion miles away at this point; it may never get closer than a billion miles from the Sun, and that in 2031. But given the way things have been going these last few years, we’re not banking on anything.
From the “Answering the Important Questions” file, news this week of the Massachusetts Institute of Technology’s breakthrough development of the “Oreometer,” a device to characterize the physical properties of Oreo cookies. The 3D printed device is capable of clamping onto the wafer parts of the popular sandwich cookie while applying axial torque. The yield strength of the tasty goop gluing the two wafers together can be analyzed, with particular emphasis on elucidating why it always seems to stay primarily on one wafer. Thoughtfully, the MIT folks made the Oreometer models available to one and all, so you can print one up and start your own line of cookie-related research. As a starting point, maybe take a look at the shear strength of the different flavors of Oreo, which might answer why the world needs Carrot Cake Oreos.
And finally, since we mentioned the word “skiving” last week in this space, it seems like the all-knowing algorithm has taken it upon itself to throw this fascinating look at bookbinding into our feed. We’re not complaining, mind you; the look inside Dublin’s J.E. Newman and Sons bookbinding shop, circa 1981, was worth every second of the 23-minute video. Absolutely everything was done by hand back then, and we’d imagine that very little has changed in the shop over the ensuing decades. The detail work is incredible, especially considering that very few jigs or fixtures are used to ensure that everything lines up. By the way, “skiving” in this case refers to the process of thinning out leather using a razor-sharp knife held on a bias to the material. It’s similar to the just-as-fascinating process used to make heat sinks that we happened upon last week.
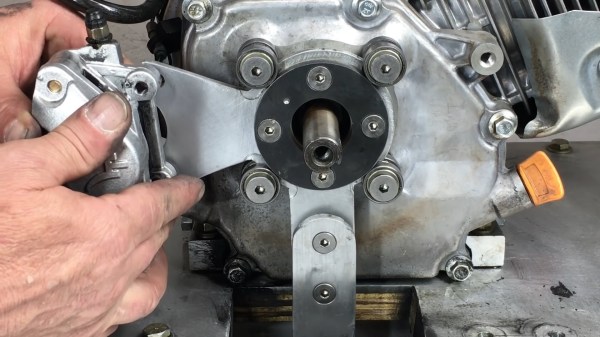
When hackers in the US think of a retailer called Harbor Freight, we usually think of cheap tools, workable but terrible DVM’s, zip ties, and tarps. [Jimbo] over at [Robot Cantina] looked at the 212cc “Predator” engine that they sell and thought “I bet I could power my Honda Insight with that.” And he did, successfully! How much power did the heavily modified engine make? In the video below the break, [Jimbo] takes us through the process of measuring its output using a home built dyno.
The dyno that [Jimbo] has built is a Prony Dyno, and it’s among the oldest and simplest designs available. A torque arm is extended from a disk brake caliper and connects to a force gauge. The engine is ran up to its highest speed, and then he brake is applied to the crankshaft until the engine almost stalls. A tachometer keep track of the RPM, and the force gauge measures the force on the torque arm. Torque is multiplied by RPM and the result is divided by a constant of 5252, and voilà: Horsepower. A computer plots the results across the entire range, and the dyno test is complete.
That only tells part of the story, and the real hack comes when you realize that the dyno stand, the force gauge setup and pretty much everything that can be built at home has been built at home. You’ll also enjoy seeing the results of some driving tests between the 212cc engine and its bigger 420cc brother, how even minor changes to the engine affect the horsepower and torque curves, and how that affects the Honda that he calls his “Street legal go cart.”